|
Yuxin Chen - 陈瑀昕 Hi! I’m a fourth-year Ph.D. candidate at UC Berkeley and a member of BAIR. I’m fortunate to be advised by Prof. Masayoshi Tomizuka, an NAE member in the MSC Lab.
|
yuxinc [at] berkeley [dot] edu |
|
 One accepted paper (
One accepted paper (
Publication & Preprint* denotes equal contribution |
|
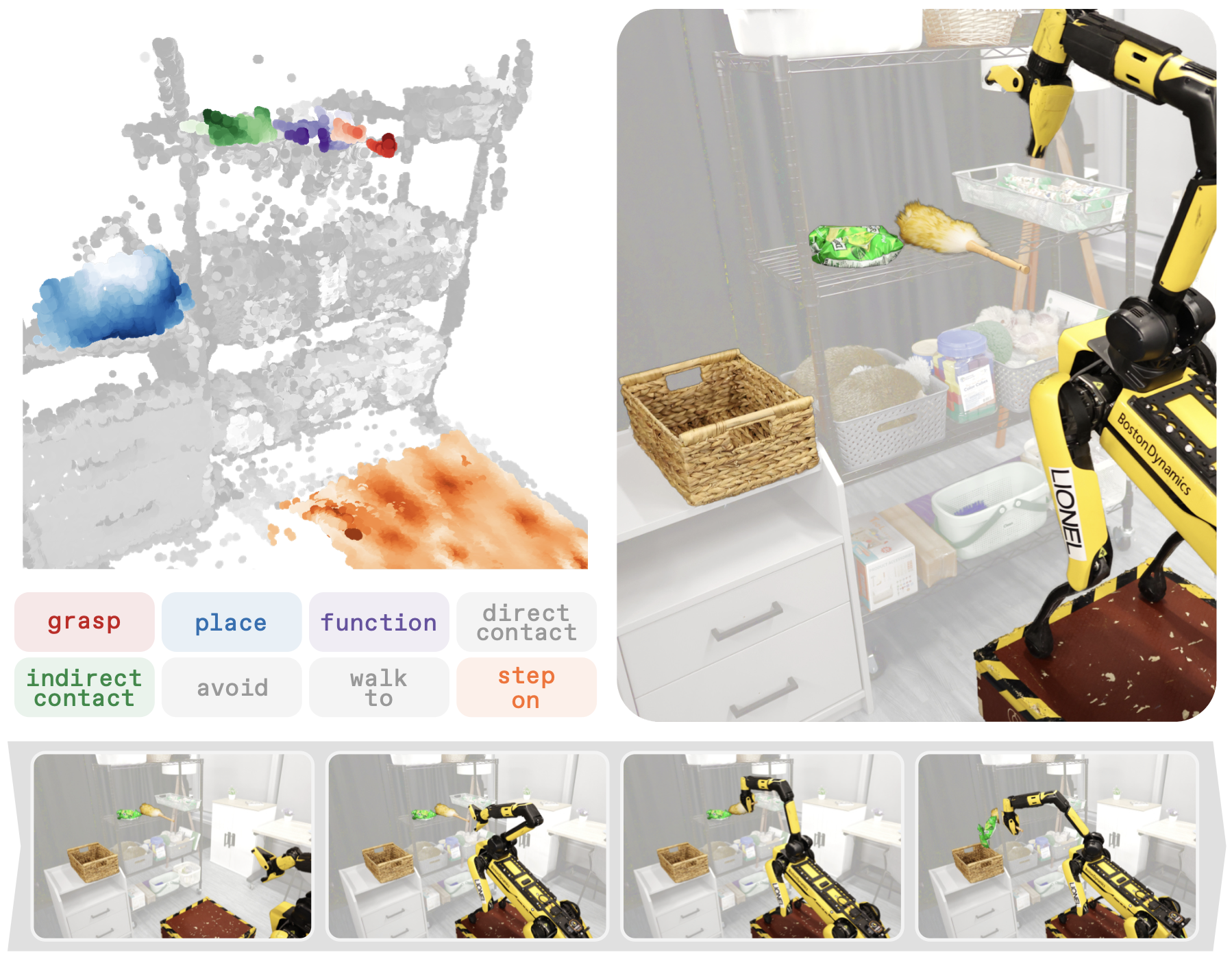
Kuan Fang*, Yuxin Chen*, Xinghao Zhu*, Farzad Niroui, Lingfeng Sun, Jiuguang Wang RA-L, 2026 arXiv / Project Page |
|
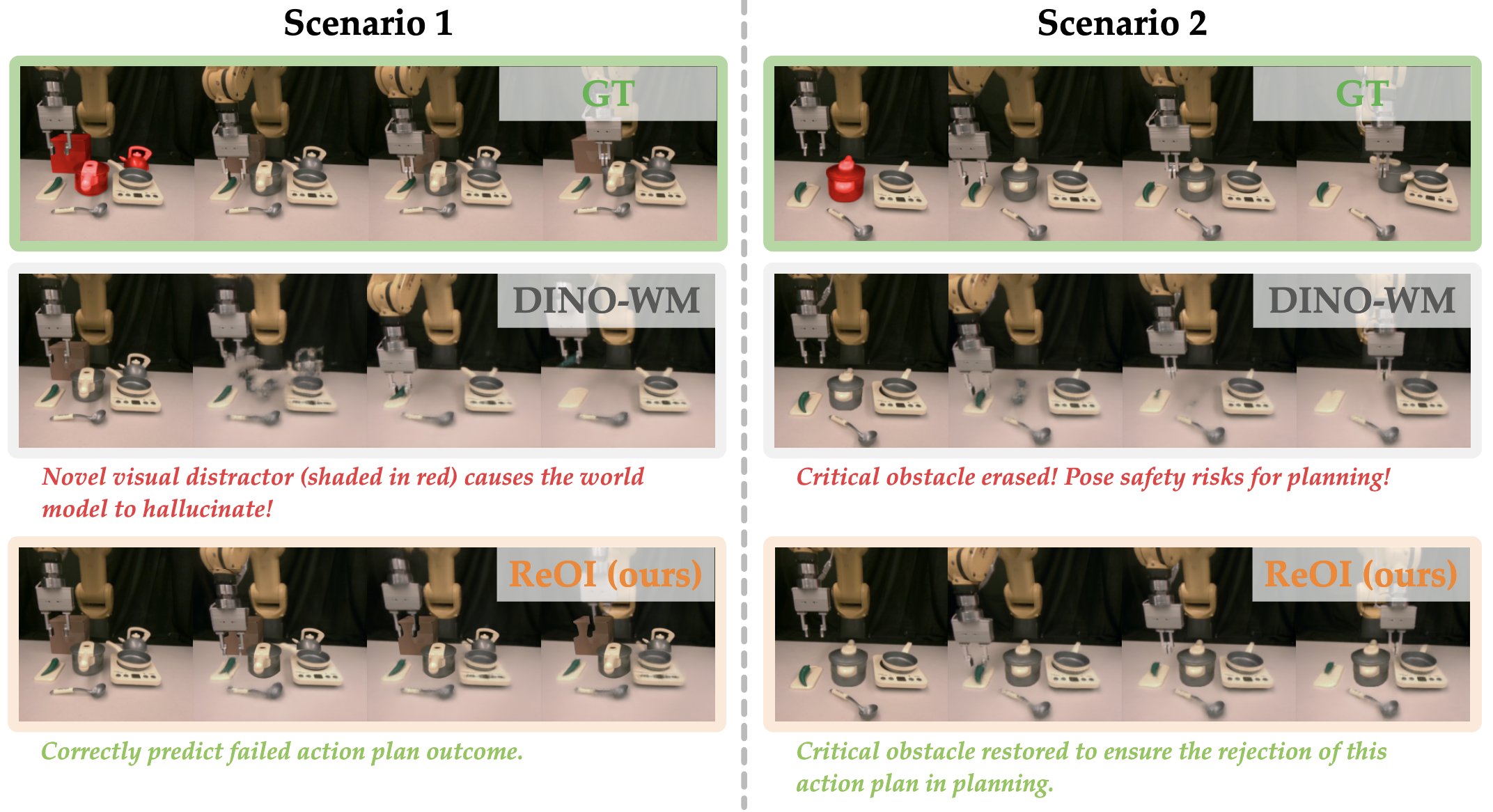
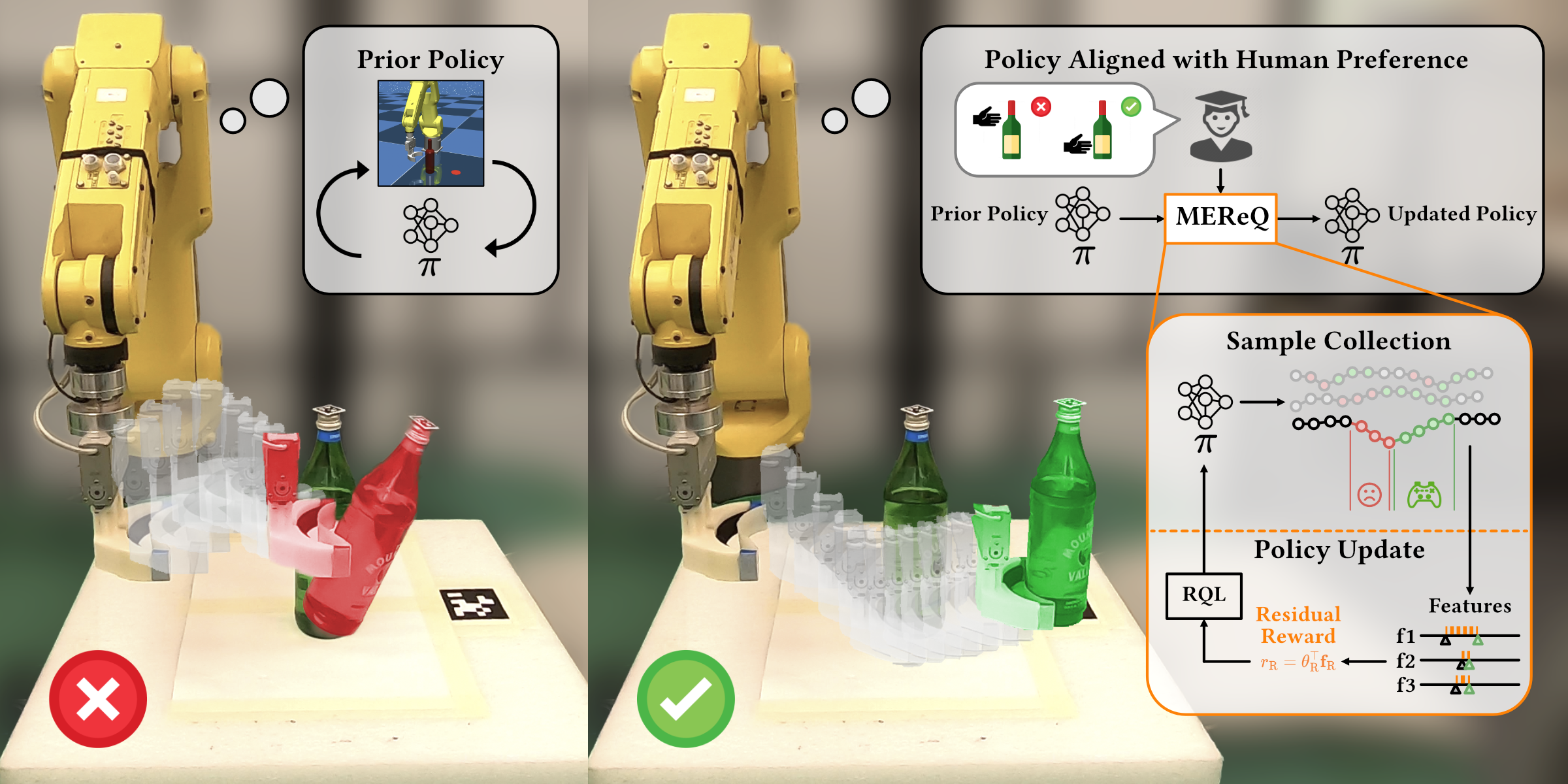
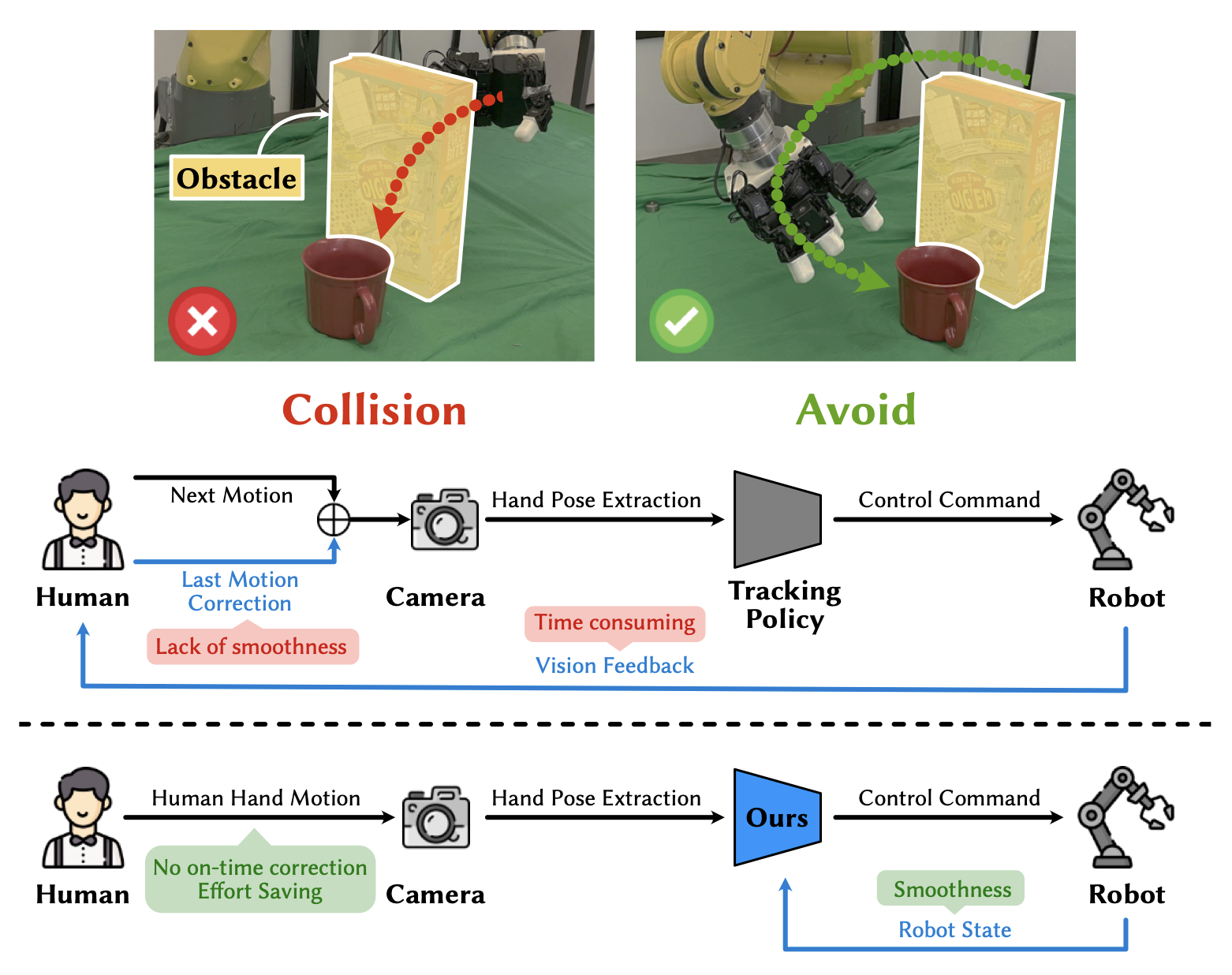
Yuxin Chen*, Jianglan Wei*, Chenfeng Xu, Boyi Li, Masayoshi Tomizuka, Andrea Bajcsy, Ran Tian ICRA, 2026 RSS workshop on OOD, 2025 (Oral, Best Paper Finalist) arXiv |
|
Shuqi Zhao, Ke Yang, Yuxin Chen, Chenran Li, Yichen Xie, Xiang Zhang, Changhao Wang, Masayoshi Tomizuka ICRA, 2026 arXiv |
|
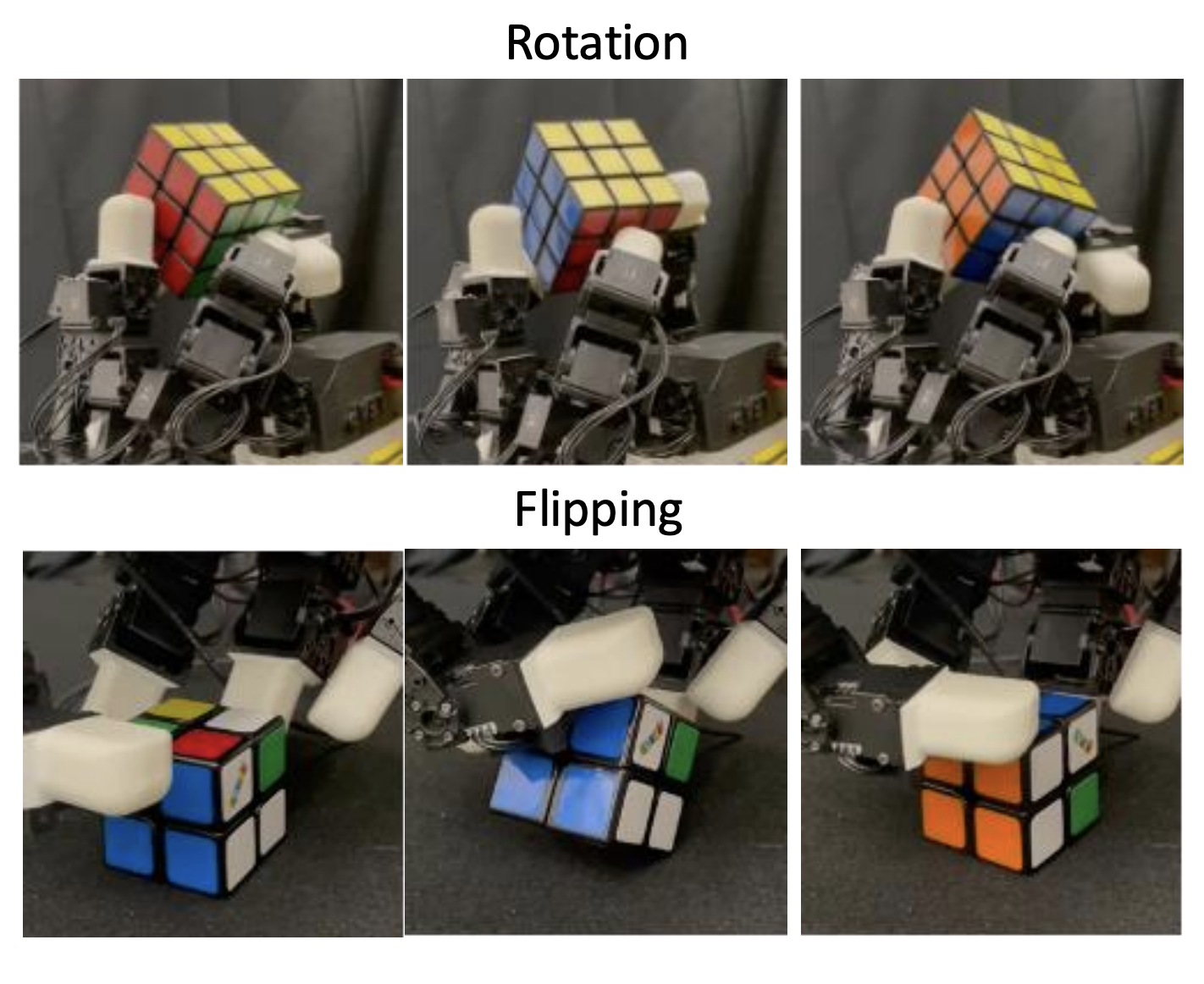
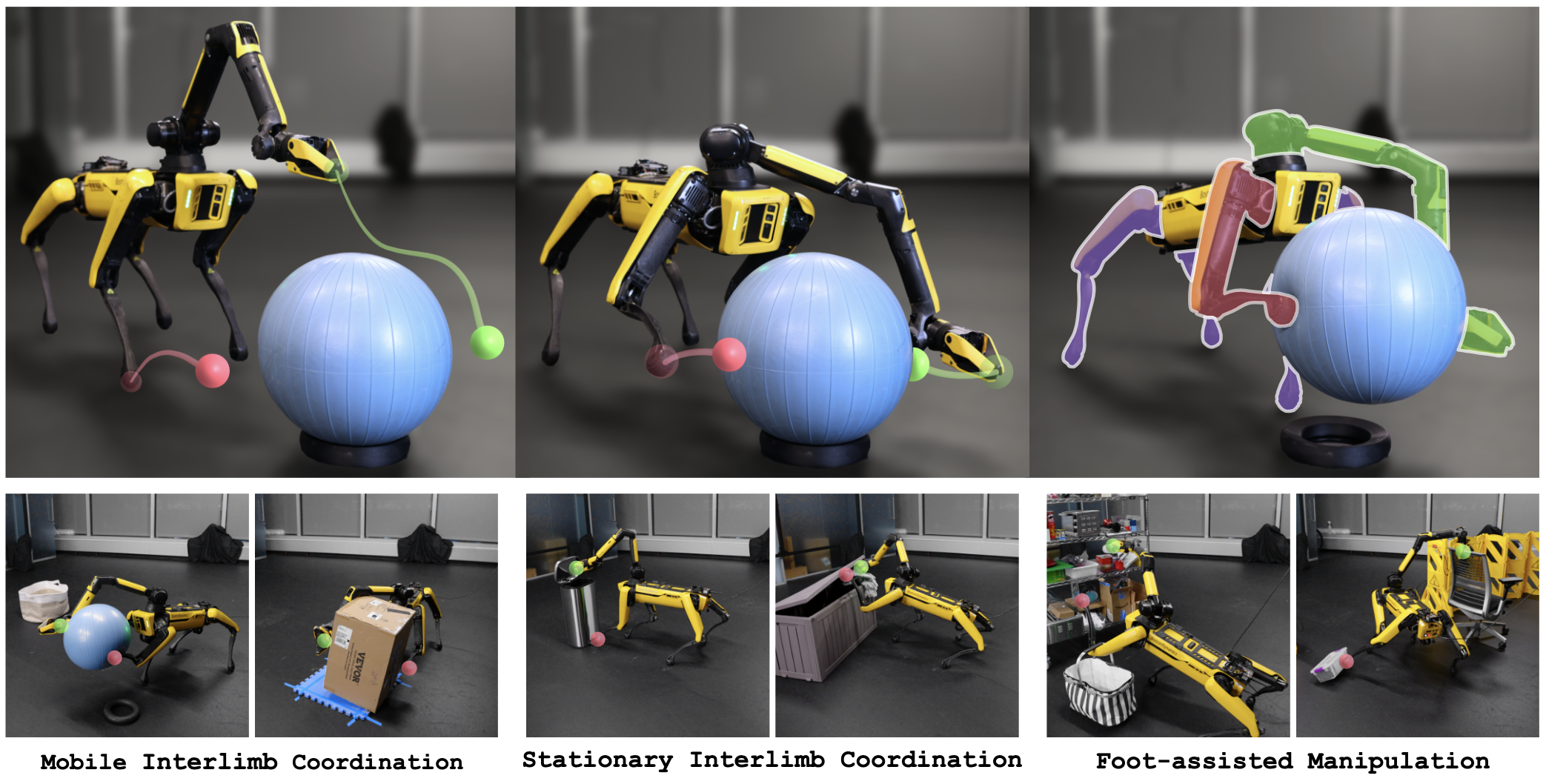
Xinghao Zhu*, Yuxin Chen*, Lingfeng Sun*, Farzad Niroui, Simon Le Cleac'h, Jiuguang Wang, Kuan Fang CoRL, 2025 (Oral) RSS workshop on WCBM, 2025 arXiv / Project Page |
|
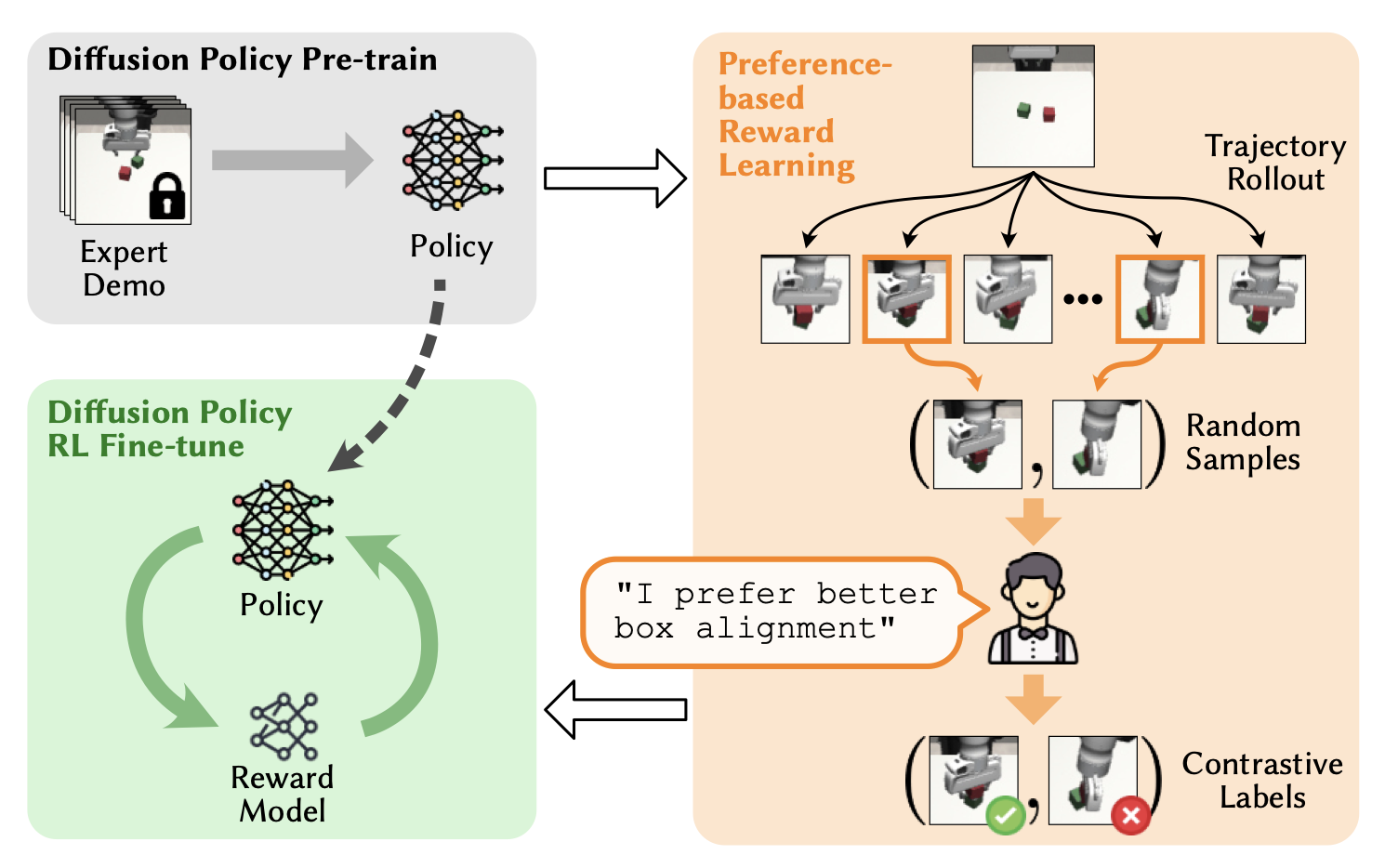
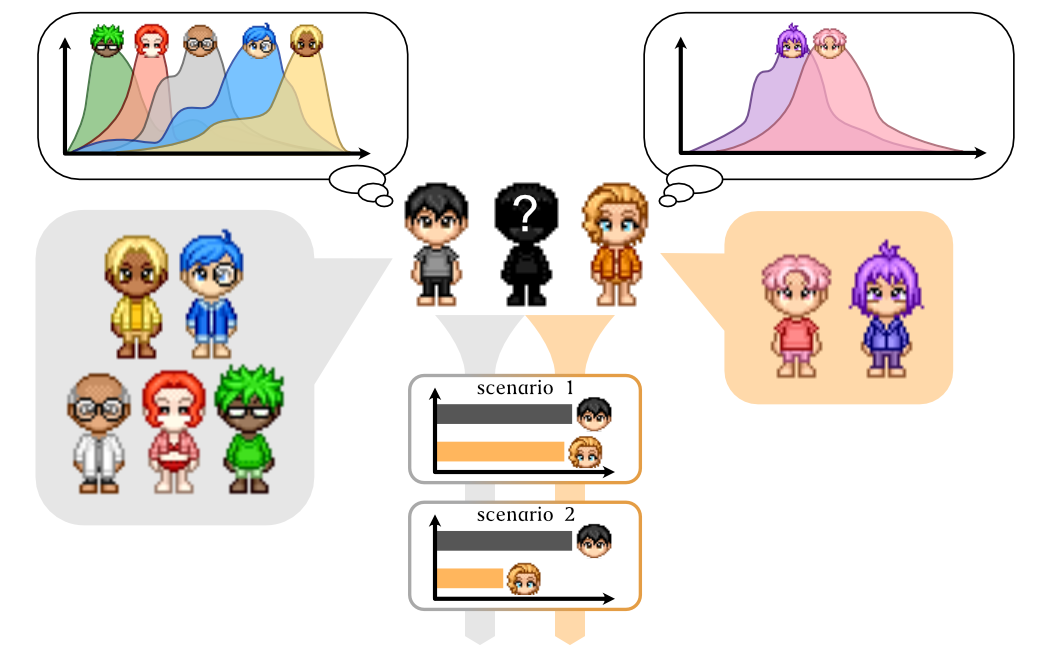
Yuxin Chen*, Chen Tang*, Chenran Li, Ran Tian, Peter Stone, Masayoshi Tomizuka, Wei Zhan CoRL, 2025 arXiv / Project Page |
|
Yuxin Chen, Devesh K. Jha, Masayoshi Tomizuka, Diego Romeres ICRA, 2025 ICRA workshop on safe VLM, 2025 (Oral) arXiv |
|
Tianqi Zhang, Zheng Wu, Yuxin Chen, Yixiao Wang, Boyuan Liang, Scott Moura, Masayoshi Tomizuka, Mingyu Ding, Wei Zhan ICRA, 2025 (Best Paper Award in Automation) arXiv / Code |
|
Shuqi Zhao*, Xinghao Zhu*, Yuxin Chen, Chenran Li, Xiang Zhang, Mingyu Ding, Masayoshi Tomizuka T-MECH, 2025 arXiv |
|
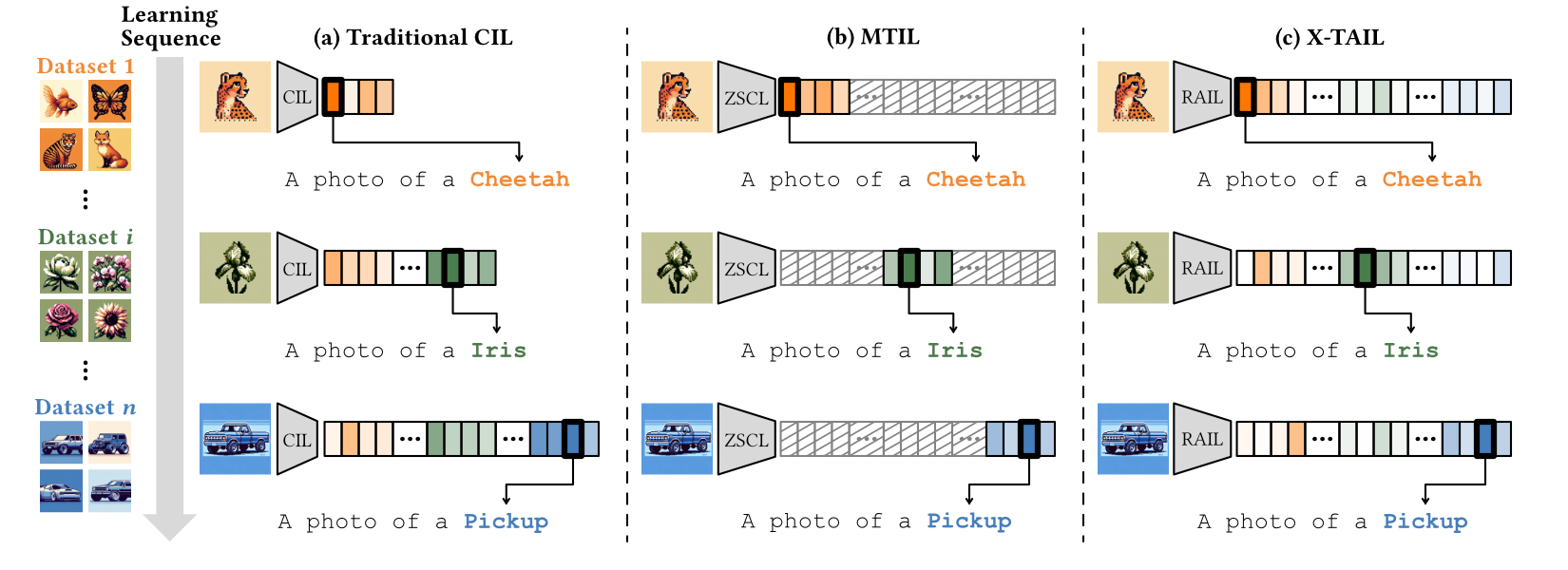
Yuxin Chen*, Yicheng Xu*, Jiahao Nie, Yusong Wang, Huiping Zhuang, Manabu Okumura NeurIPS, 2024 arXiv / Code |
|
Yuxin Chen, Chen Tang, Ran Tian, Chenran Li, Jinning Li, Masayoshi Tomizuka, Wei Zhan RLC, 2024 AAMAS, 2024 arXiv / Code |
|
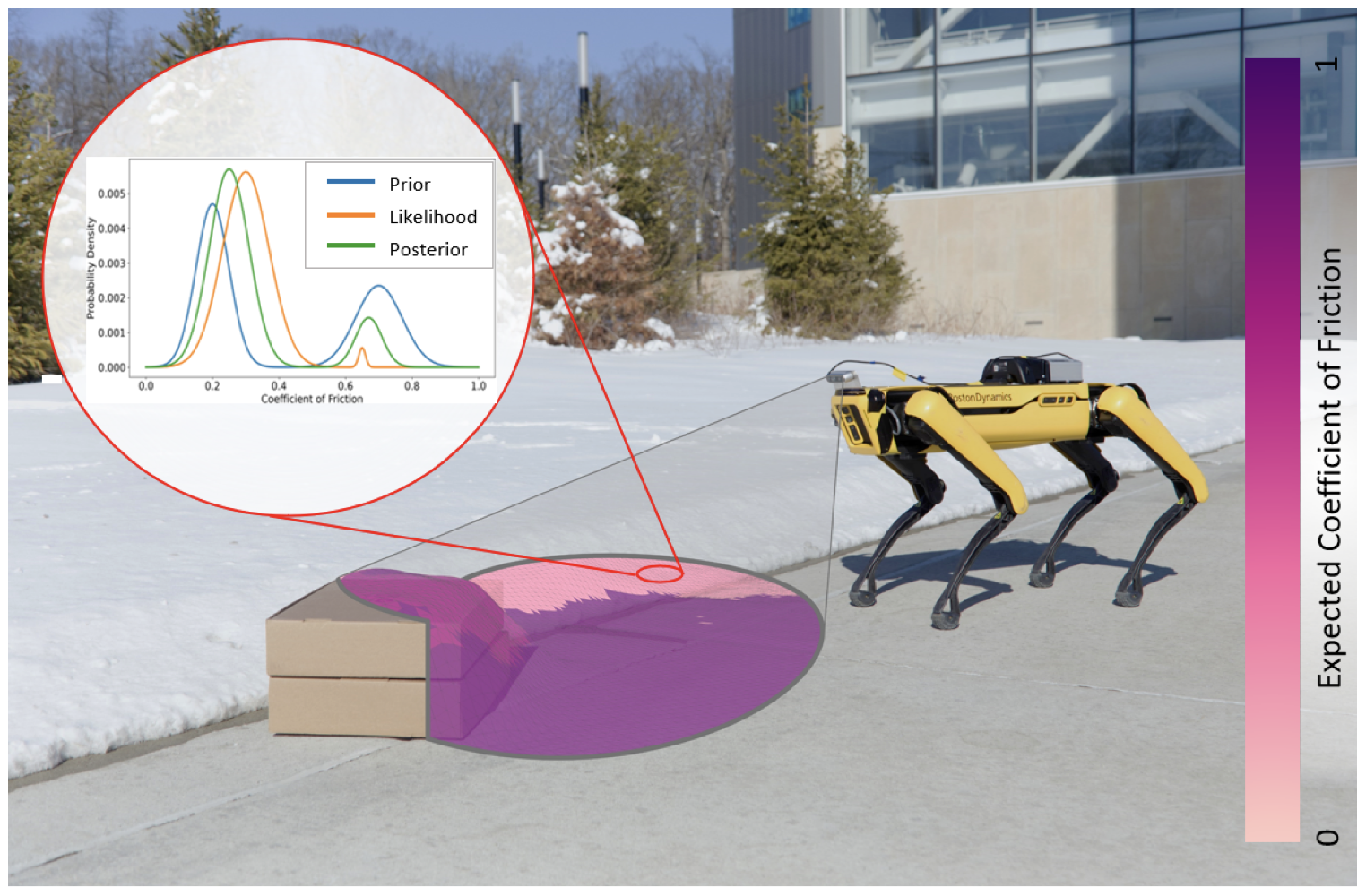
Parker Ewen, Adam Li, Yuxin Chen, Steven Hong, Ram Vasudevan RA-L, 2022 arXiv / Project Page / Code / Video |
|
Parker Ewen, Jean-Pierre Sleiman, Yuxin Chen, Wei-Chun Lu, Marco Hutter, Ram Vasudevan ICRA, 2021 arXiv / Video |
Experience |
|
|
Nvidia, Santa Clara, CA • Research Intern • Mar. 2026 ~ Present • Work on Vision-Language-Action Models and World Models for Robotics |
|
|
RAI Institute (Boston Dynamics AI Institute), Cambridge, MA • Research Intern • Mar. 2025 ~ Jul. 2025 • Work on dexterous mobile manipulation |
|
|
Mitsubishi Electric Research Laboratories, Cambridge, MA • Research Intern • May. 2024 ~ Aug. 2024 • Work on generative model on manipulation |
|
|
Zoox, Foster City, CA • Software Engineering Intern • May. 2021 ~ Aug. 2021 • Work on motion planning for L5 robotaxi |
Education |
|
|
UC Berkeley, Berkeley, CA • PhD in Mechanical Engineering, Robotics & Control (2022 to Present) |
|
|
University of Michigan, Ann Arbor, MI • MS in Robotics (2020 to 2022) • BS in Aerospace (2018 to 2020) |
|
|
Shanghai Jiao Tong University, Shanghai, China • BS in Mechanical Engineering (2016 to 2020) |
|
Template from Jon Barron |